柔性驱动材料在智能机器人的发展中具有重要作用。为了使得智能软体机器人具有自反馈的功能,开发具有感知功能的柔性驱动系统至关重要。然而,目前具有机械感知功能的驱动系统大多依赖于多种功能单元的集成和复杂的电路设计,因此,亟需发展一种新型的高度集成感知功能的驱动器。
我校物理与能源学院陈鲁倬教授团队一直从事智能材料与软件机器人、能源转换与存储材料的应用基础研究。近日,在前期工作(Adv. Funct. Mater.2019, 29, 1806057;Nano Energy2020, 68, 104365)的基础上,陈鲁倬教授团队报道了一种基于碳纳米管和蚕丝复合材料的新型压力感知驱动器,它在材料层面上集成了感知、驱动和决策的功能。该驱动器由一个驱动单元和一个压力感知单元组成。一方面,驱动单元可以由低电压驱动。另一方面,可以用压力控制通过压力感知单元的电流,实现了对压力感知单元施加不同的压力来控制驱动单元的形变幅度。进一步,制备了一个便携式的触觉控制机器手,通过压力控制来操作物体,展示了其在触觉软体机器人中的应用。最后,提出了三个可视化逻辑门(与门、或门、非门),将“触觉”输入转换为“可视化”的输出(驱动单元的形变)。这项研究有望为基于纳米材料的智能软体机器人和新一代的逻辑器件提供一个新的发展思路。
该研究成果以《Pressure-Perceptive Actuators for Tactile Soft Robots and Visual Logic Devices》为题发表于国际高水平学术期刊《Advanced Science》(IF=16.806)上。该论文福建师范大学为第一单位,我校周培迪博士研究生和林建硕士研究生为共同第一作者,陈鲁倬教授为唯一通讯作者。该研究工作得到国家自然科学基金、福建省自然科学基金重点项目、福建省特支“双百计划”、福建省高校新世纪优秀人才等项目资助。
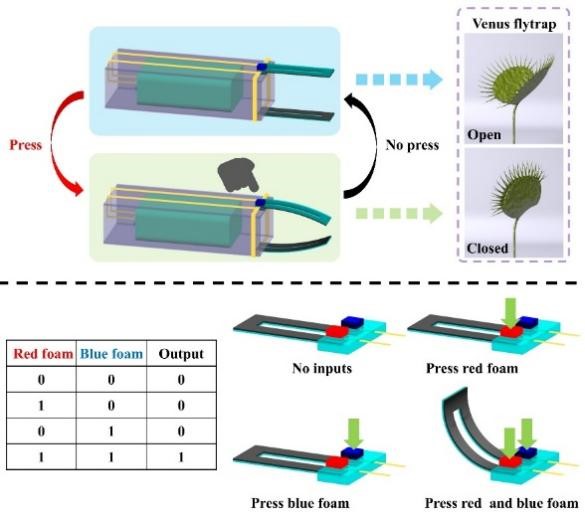
基于压力感知驱动器的触觉控制机器手和可视化逻辑门器件